Hi! I'm Ruiji Liu, currently working on humanoid robotics at Dexforce AI, focusing on Vision-Language-Action (VLA),
Vision-Language Models (VLM), Reinforcement Learning (RL), and teleoperation for dual-arm humanoid systems.
Previously, I was a Graduate Research Assistant at the
Kantor Lab in the
CMU Robotics Institute. I work on AI-driven robotic arm manipulation
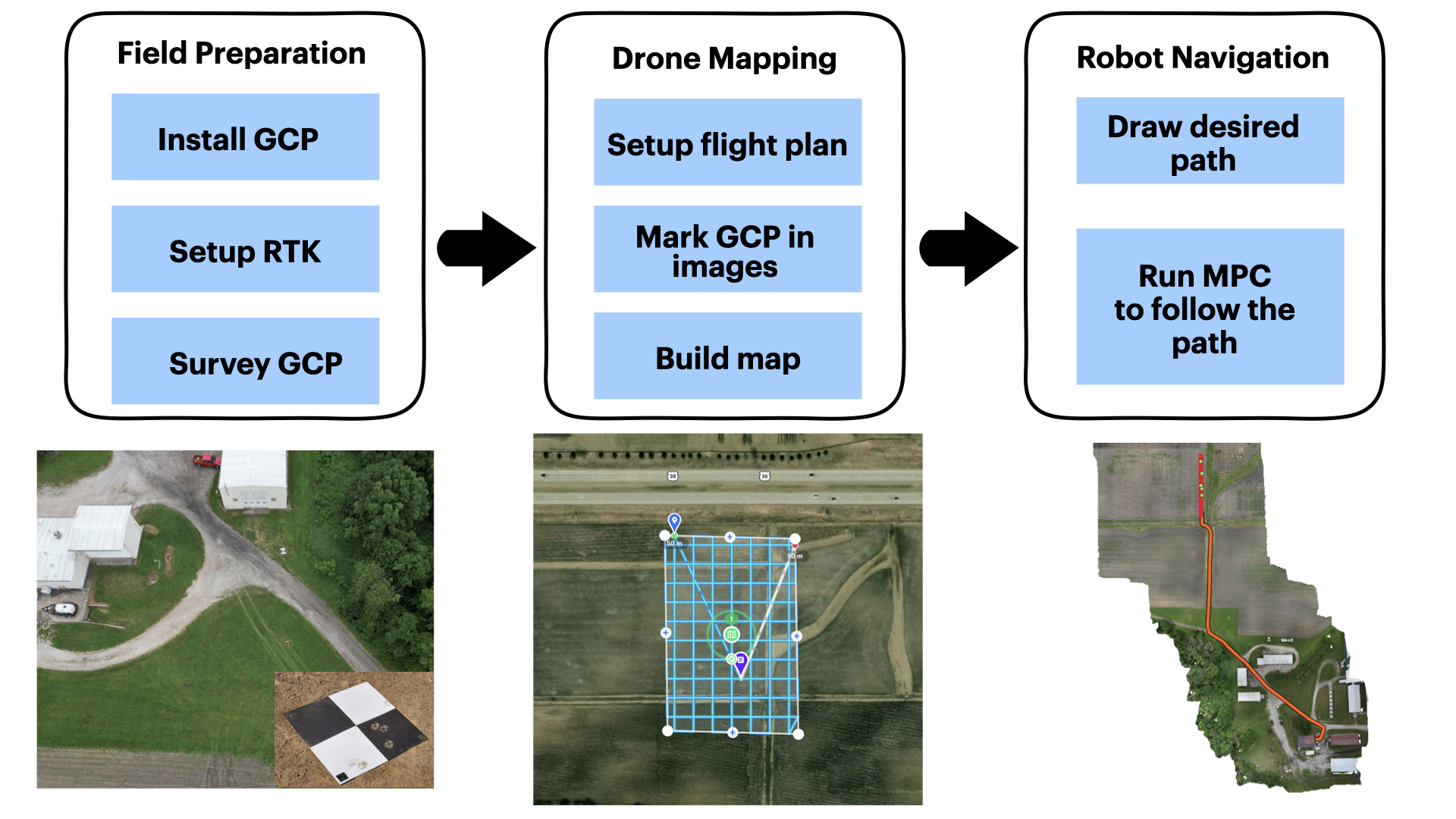
and autonomous navigation in field robotics under
Prof. George Kantor guidance.
My previous research focuses on Perception & Control for autonomous navigation and manipulation in diverse robotic systems
(UGVs, UAVs, & legged robots). I aim to enable robots to handle hazardous tasks like rescue and exploration,
as well as automate repetitive tasks such as goods transportation. My core interests include
CV, SLAM, path planning, control, and robot learning.
Previously, I earned an M.S. in Mechanical Engineering at CMU, where I worked on LiDAR-based crop-agnostic
autonomous navigation under
Prof. George Kantor. My thesis,
Towards Over-Canopy Autonomous Navigation, explores LiDAR-based crop-row detection.
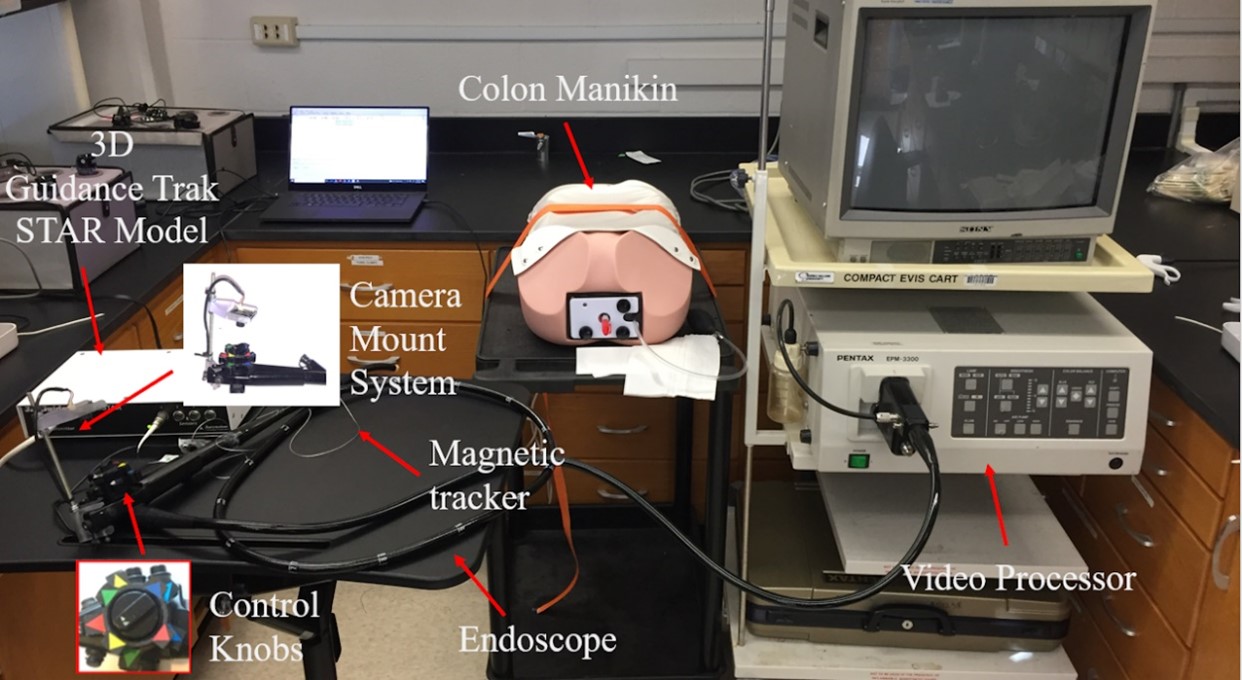
I completed my B.S. in Mechanical Engineering at Penn State, where I researched construction and medical robotics under
Prof. Jason Moore and
Prof. Alan Wagner.
Education
Master in Mechanical Engineering (Robotics & Control Systems), Carnegie Mellon UniversityAug. 2022 ~ May. 2024
Bachelor in Mechanical Engineering, Pennsylvania State UniversityAug. 2018 ~ May. 2022